Wavenumber lock-in in buckled elastic structures with spatially varying compressive stresses
with K. Bertoldi, A. Djellouli, G. Risso
|
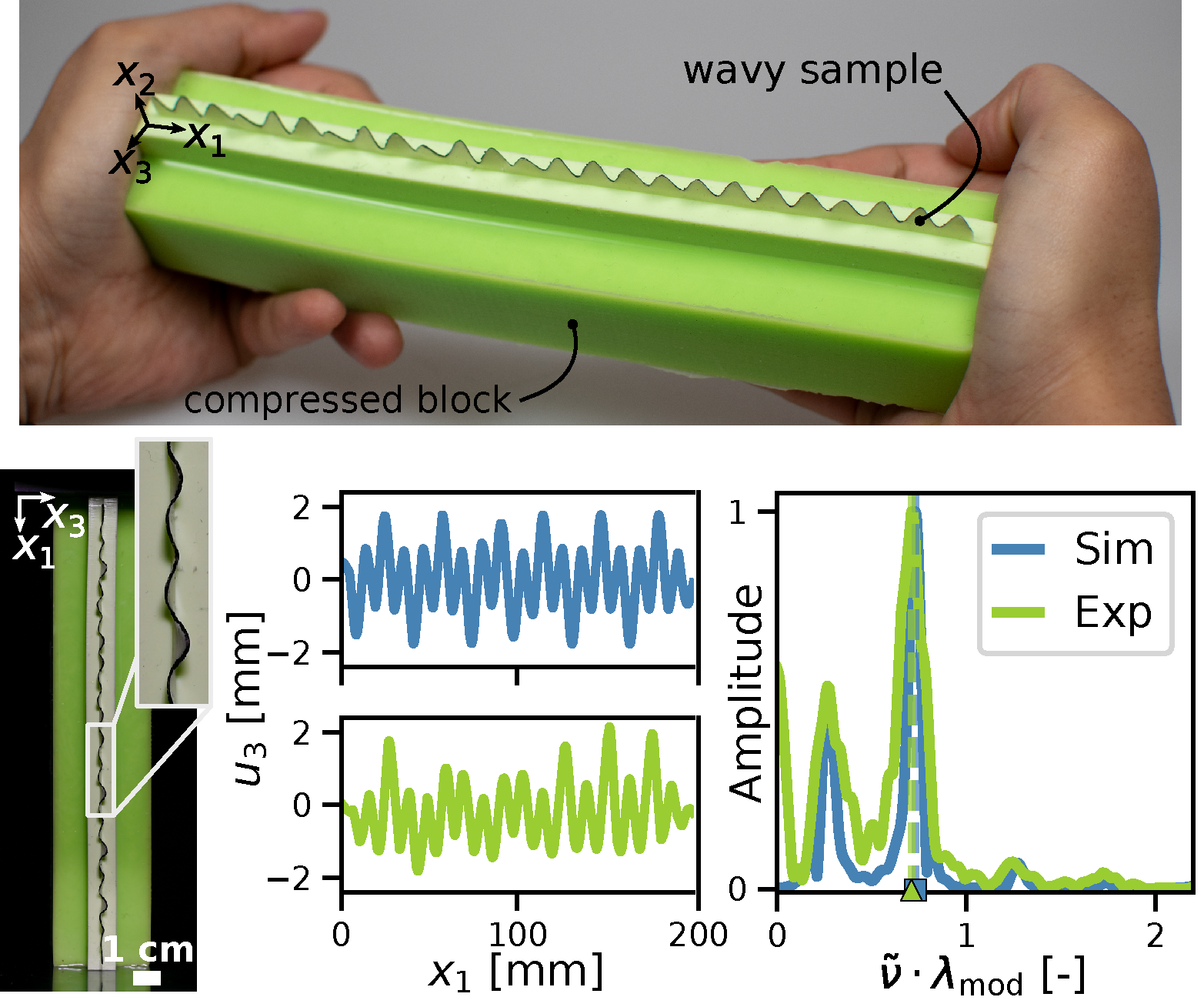
Parametric instabilities are a known feature of periodically driven dynamic systems; at particular frequencies and amplitudes of the driving modulation, the system’s quasi-periodic response undergoes a frequency lock-in, leading to a periodically unstable response. Here, we demonstrate an analogous phenomenon in a purely static context [1]. We show that the buckling patterns of an elastic beam resting on a modulated Winkler foundation display the same kind of frequency lock-in observed in dynamic systems. Through simulations and experiments, we reveal that compressed elastic strips with modulated height alternate between predictable quasi-periodic and periodic buckling modes (see figure). Our findings uncover previously unexplored analogies between structural and dynamic instabilities, highlighting how even simple elastic structures can give rise to rich and intriguing behaviors. |
[1] H. E. Read, G. Risso, A. Djellouli, K. Bertoldi and A. Lazarus, "Wavenumber lock-in in buckled elastic structures: an analogue to parametric instabilities", Physical Review Letters, 136 (20), 208201 (2026). [html, pdf, SI]
Floquet-Bloch quantum analogs in time
with E. Trélat
|
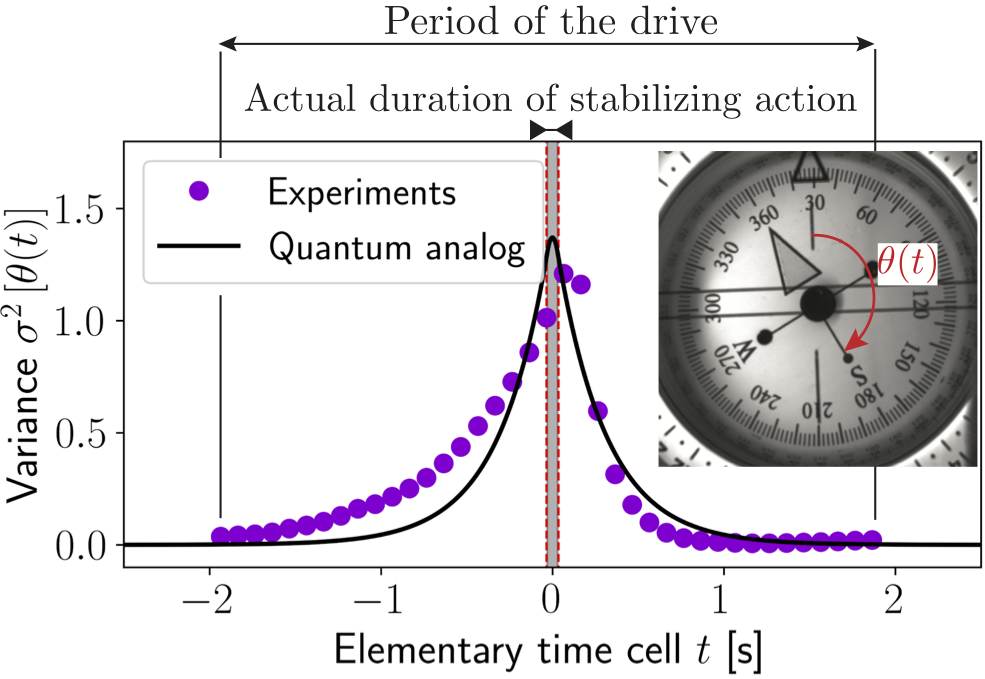
We show that, in a specific region of their modulation-parameter space (the so-called optimal dynamical stabilization regime as shown in the figure [1]), linear time-periodic systems behave as quantum analogs where time plays the role normally assigned to space [2]. In these dynamical systems, it is indeed possible to rationalize the discrete set of stable trajectories - and their associated modulation functions - not only through initial-value problems, but through a single boundary-value problem that is mathematically analogous to a 1D Schrödinger equation [2]. Understanding this new class of quantum analogs not only deepens our physical insight into time-periodic systems, but also opens the door to exotic functionalities in dynamical systems, including unprecedented forms of passive control and quantum-inspired computing architectures based on vibrating structures. |
[1] A. Lazarus and E. Trélat, "Optimal dynamical stabilization", Physical Review E, 113 (3), 034204 (2026). [html, pdf]
[2] A. Lazarus, "Discrete dynamical stabilization of a naturally diverging mass in a harmonically time-varying potential", Physica D: Nonlinear Phenomena, 386-387, 1-7 (2019). [html, pdf, video]
[3] A. Lazarus and E. Trélat, "A Periodic Optimal Control Problem for a Bilinear Harmonic Oscillator, with Applications in Quantum and Classical Physics", to appear in SIAM Journal on Control and Optimization (2026). [html]
Harnessing Oscillatory Dynamics for Reprogrammable Mechanical Functionality
with K. Bertoldi, G. Risso
|
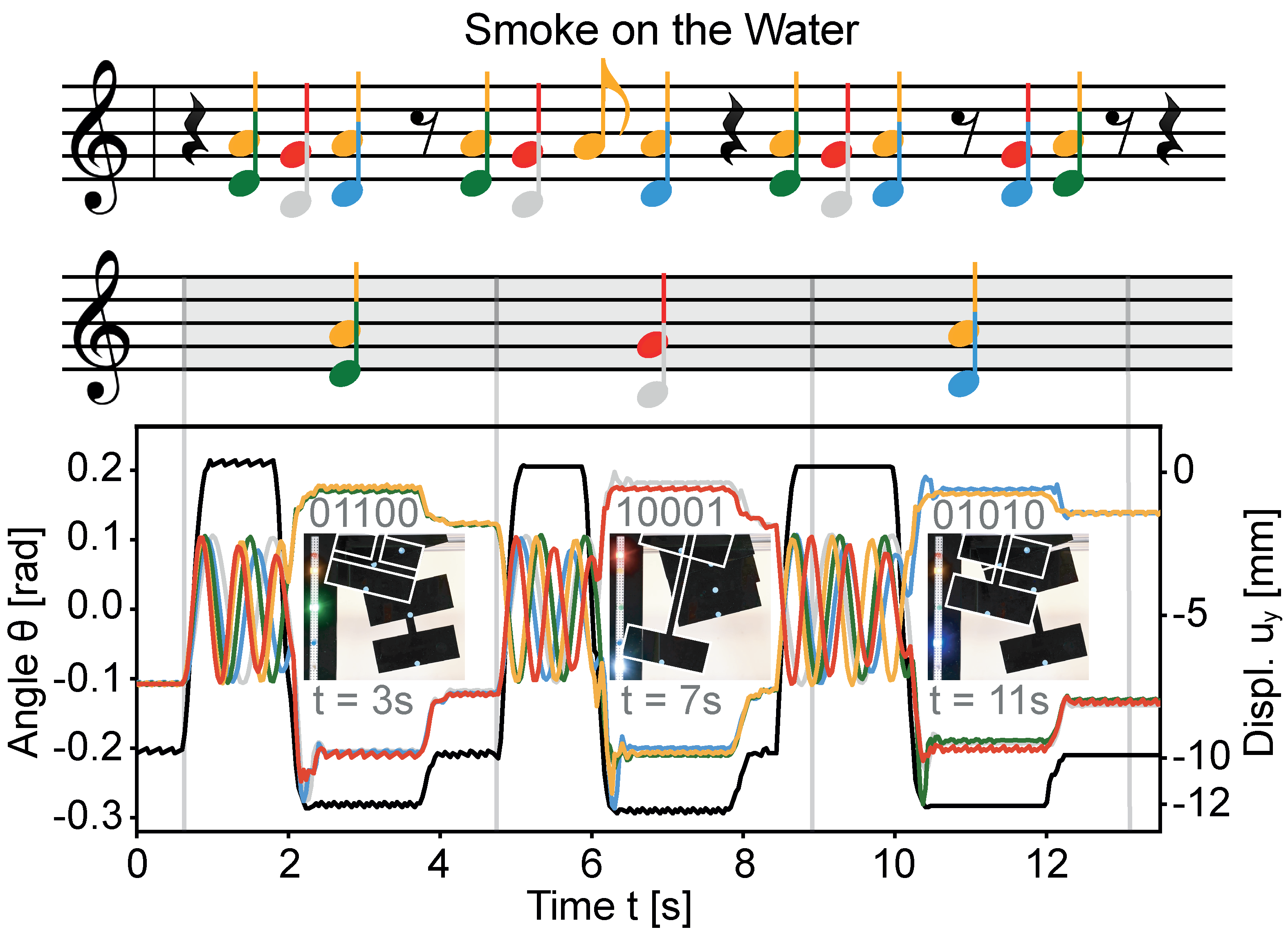
Achieving true mechanical reprogrammability - where structural functions can be dynamically defined, modified, and accessed on demand - requires the ability to arbitrarily set and alter the states of arrays of mechanical bits. Here, we introduce a new approach that accomplishes exactly this by exploiting asynchronous symmetry breaking in oscillator arrays driven by a single global actuator [1]. Using an array of pendula as an experimental model, we show that intrinsic frequency separation enables arbitrary information writing and even makes possible the realization of a mechanical piano (see figure). Because the system is controlled exclusively through the timing of a global actuation signal, this strategy offers a scalable and efficient route toward reprogrammable matter, with applicability across elastic structures, chemical oscillators, and electronic circuits. |
[1] S. Monnery, G. Risso, L. Plado Costante, A. Lazarus and K. Bertoldi, "Harnessing Oscillatory Dynamics for Reprogrammable Mechanical Functionality", Advanced Functional Materials, e75229 (2026). [html, pdf, video]
Space-dependent diffusion of bouncing grains
with A. Abramian, O. Devauchelle, P. Popović, S. Protière, P. Szymczak

|
In his 1787 book, Ernst Chladni reported an accoustic phenomenon that had intrigued Galileo Galilei and Robert Hooke before him. When a plate of metal resonates, sand, dust or salt grains gather along geometric lines on its surface. The lines were later explained by the theory of elasticity, but the gathering of the grains remained mysterious. A new series of experiments confirms general intuition: The grains diffuse randomly over the vibrating plate, until they get trapped in places of low diffusivity [1]. This mechanism, however, is at odds with the behavior of molecules which, in thermal equilibrium, uniformly occupy whatever space is available to them. Surprisingly, bouncing sand grains turn out to be an almost perfect analogue of classical thermodynamics [2]. They have a temperature, follow the same velocity distribution as molecules in a gas, and their diffusivity relates to temperature in the same way. They can even generate a current entirely powered by thermal fluctuations [3]. The detailed mechanics of their jumps, however, cause their diffusive behavior to depart from that of molecules, and it is this tiny difference that allowed Chladni to impress Napoleon himself. |
[1] A.Abramian, S. Protière, A. Lazarus and O. Devauchelle, "Chladni patterns explained by the space-dependent diffusion of bouncing grains", Physical Review Research, 7, L032001 (2025). [html, pdf]
[2] O. Devauchelle, P. Popović, P. Szymczak, A. Abramian and A. Lazarus, "Thermodynamics of bouncing grains", to appear in Physical Review E (2026). [html]
[3] O. Devauchelle, P. Popović, P. Szymczak, A. Abramian and A. Lazarus, "A granular Büttiker-Landauer motor", to appear in Physical Review Letters (2026). [html]
Beyond the tip of the parametric instability tongues
with S. Protière
|
Periodically time-varying systems are a class of mathematical problems that underlie many important phenomena and applications in physics, such as parametric instabilities or mass spectrometers. Eventually, the mechanics underlying these problems is fundamentally understood by studying the dynamic stability of a mass in a potential energy landscape that is periodically varying with time. We present here such fundamental models, both theoretically and experimentally, and show new appealing results when the variation of energy landscape is large and happens in a time scale similar to the one of the particle [1,2]. Although in this case, classical approaches such as perturbation theories or averaging techniques are no more useful, it is still possible to establish elementary synchronization rules that should be of interest for new promising functionalities in dynamical systems. Notably, looking for an optimal fashion to trap a mass in a strongly oscillating energy field can actually be done by using mathematical rules of quantum physics [2]. |
[1] A. A. Grandi, S. Protière and A. Lazarus, "Enhancing and controlling parametric instabilities in mechanical systems", Extreme Mechanics Letters, 43, 101195 (2021). [html, pdf]
[2] A. A. Grandi, S. Protière and A. Lazarus, "New physical insights in dynamical stabilization: introducing Periodically Oscillating-Diverging Systems (PODS)", Nonlinear Dynamics, 111, 12339-12357 (2023). [html, pdf]
Physical validation of simulators in Computer Graphics
with F. Bertails-Descoubes, V. Romero, S. Neukirch

|
We introduce a selected set of protocols inspired from the Soft Matter Physics community in order to validate Computer Graphics simulators of slender elastic structures possibly subject to dry frictional contact [1]. Although these simulators were primarily intended for feature film animation, they are more and more used as virtual design tools for predicting the deformation of real objects; hence the need for a careful, quantitative validation. We have passed a number of popular codes of Computer Graphics through four benchmarks (experimentally verified), by defining a rigorous, consistent, and as fair as possible methodology. Our results show that while some popular simulators for plates/shells and frictional contact fail even on the simplest scenarios, more recent ones, as well as well-known codes for rods, generally perform well and sometimes even better than some reference commercial tools of Mechanical Engineering. |
[1] V. Romero, M. Ly, A.H. Rasheed, R. Charrondière, A. Lazarus, S. Neukirch and F. Bertails-Descoubes, "Physical validation of simulators in graphics: A new framework dedicated to slender elastic structures and frictional contact", ACM Transactions on Graphics, 40, 4, art. 66, 1-19 (2021). [html, pdf, video]
Numerical computation of Floquet Forms and their applications
with O. Thomas, C. Vergez, B. Cochelin
|
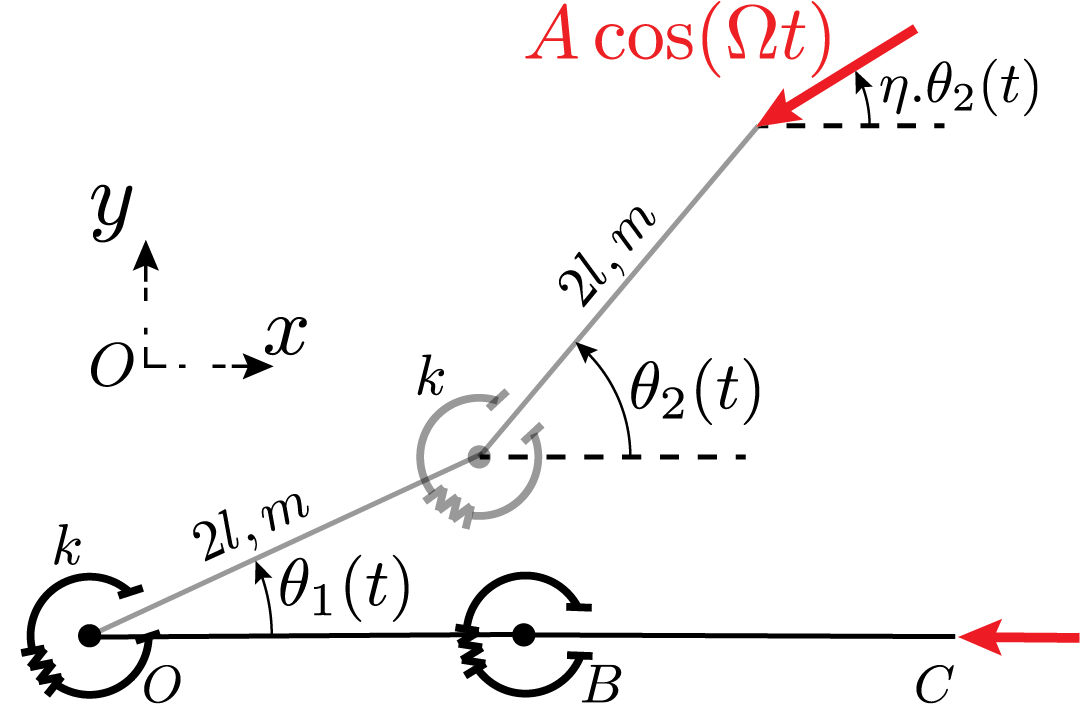
Modal analysis is an essential technique in computational engineering. It is the study of dynamical properties of structures whose local potential energy landscape is constant with time. In this work, we strive to generalize classic modal analysis to structures whose potential energy landscape varies periodically with time. We focus on elastic potential which include many practical problems from slender structures with periodic axial pre-stresses (see Figure) to the stability of structural nonlinear vibrations. Technically, periodic modal analysis relies on the computation of Floquet forms and can be implemented in the time [1] or frequency [2,3] domain. Floquet forms are a generalization of classic vibrational modes and allow to reveal intrinsic vibrational properties and dynamical instabilities of mechanical time-periodic systems [1,2] or the stability of periodic solutions of nonlinear dynamical systems [3]. |
[1] A. Lazarus, C. Maurini and S. Neukirch, "Stability of Discretized Nonlinear Elastic Systems", in Extremely Deformable Structures, Springer Vienna, CISM Courses and Lectures, 562, 1-53 (2015). [html, pdf]
[2] B. Bentvelsen and A. Lazarus, "Modal and stability analysis of structures in periodic elastic states: application to the Ziegler column", Nonlinear Dynamics, 91, 1349-1370 (2018). [html, pdf]
[3] L. Guillot, A. Lazarus, O. Thomas, C. Vergez and B. Cochelin, "A purely frequency based Floquet-Hill formulation for the efficient stability computation of periodic solutions of ordinary differential systems", Journal of Computational Physics, 416, 109477 (2020). [html, pdf]
Learning to measure friction in cloth-body and cloth-cloth contacts
with S. Wuhrer, J.-S. Franco, F. Bertails-Descoubes, V. Romero

|
Measuring contact friction in soft slender bodies usually requires a specialised physics bench and a tedious acquisition protocol. This makes the prospect of a purely non-invasive, video-based measurement technique particularly attractive. Previous works have shown that such a video-based estimation is feasible for material parameters using deep learning, but this has never been applied to the friction estimation problem which results in even more subtle visual variations (see figure where the friction coefficient changes from 0.3 to 0.7). Here, we propose a non-invasive measurement network and adjoining synthetic training dataset for estimating cloth friction at contact, for both cloth-hard body [1,2] and cloth-cloth contacts [2]. To this end we build a protocol for validating and calibrating a state-of-the-art frictional contact simulator, in order to produce a reliable dataset. We present extensive results on a large acquired test set of several hundred real video sequences of cloth in friction, which validates the proposed protocol and its accuracy. |
[1] A.H. Rasheed, V. Romero, F. Bertails-Descoubes, S. Wuhrer, J.-S. Franco and A. Lazarus, "Learning to Measure the Static Friction Coefficient in Cloth Contact", Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 9912-9921 (2020). [html, pdf]
[2] A.H. Rasheed, V. Romero, F. Bertails-Descoubes, S. Wuhrer, J.-S. Franco and A. Lazarus, "A Visual Approach to Measure Cloth-Body and Cloth-Cloth Friction Coefficient", IEEE Transaction on Pattern Analysis and Machine Intelligence, 44(10): 6683-6694 (2022). [html, pdf, video]
State transitions of slender elastic beams under constraints
with B. Audoly, C. Maurini, E. Kolb, D. Vandembroucq
|
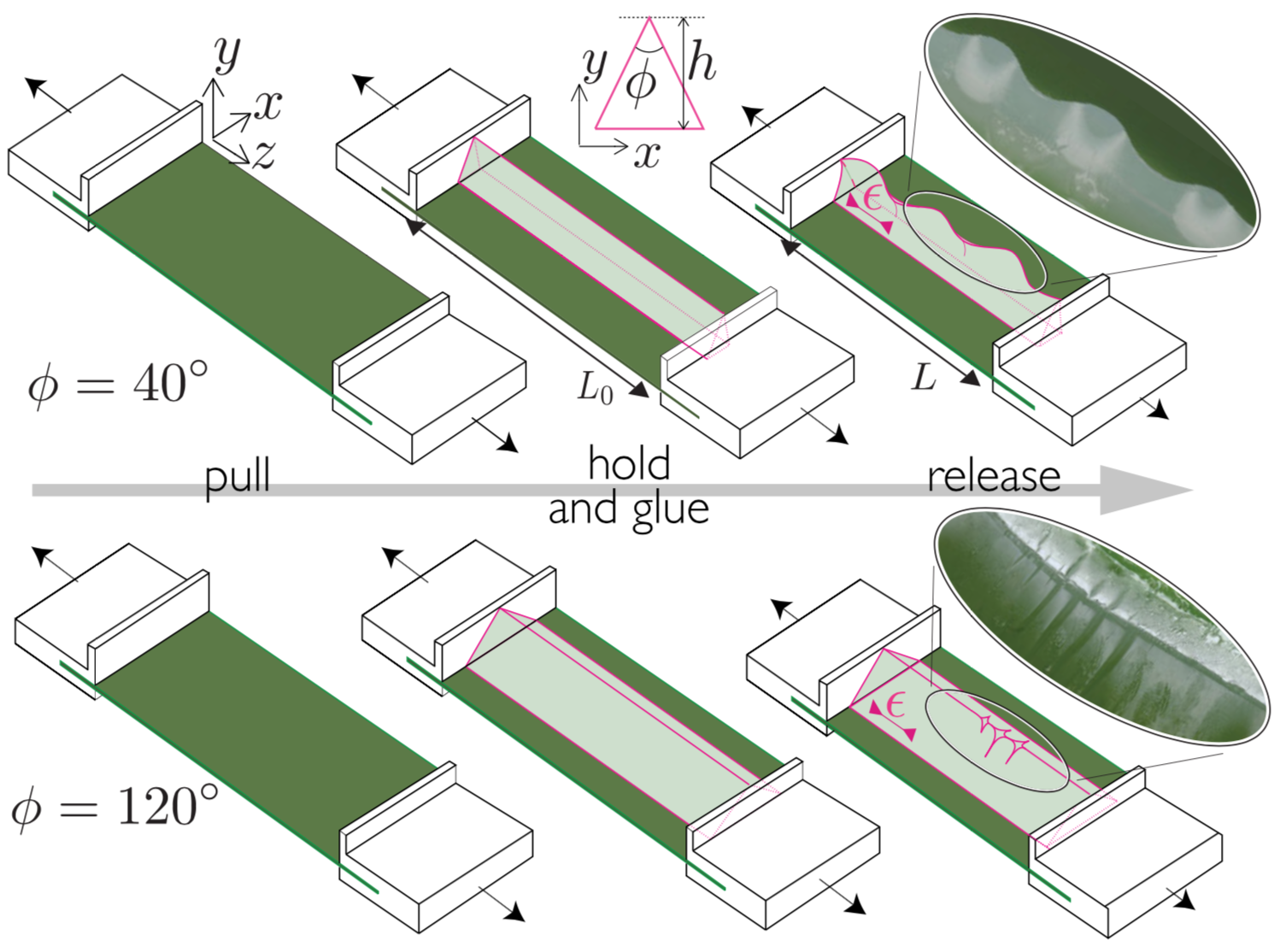
Under external loadings, slender elastic beams undergo large deformations and could even experience equilibrium state transitions or bifurcations. The characterization of equilibrium states as a function of control parameters forms the phase diagram of the system under study. When the beam is subjected to environmental constraints, this phase diagram can be modified as new phase transitions can emerge. Here, we perform combined numerical, theoretical and experimental studies of the phase transitions of fundamental problems of slender elastic structures under permanent and varying kinematic constraints. In [1], we explain the buckling transitions between wrinkling and creasing of a constrained prismatic beam as a function of ridge angle (see Figure). In [2] and [3], we describe the bending transitions in the penetration of a flexible intruder constrained in a 2D dense granular medium. |
[1] C. Lestringant, C. Maurini, A. Lazarus and B. Audoly, "Buckling of an elastic ridge: competition between wrinkles and creases", Physical Review Letters, 118, 165501 (2017). [html, pdf, SI]
[2] N. Algarra, M. Leang, A. Lazarus, D. Vandembroucq and E. Kolb, "Flexible fiber in interaction with a dense granular flow close to the jamming transition", EPJ Web of Conferences, Powders & Grains 2017, 140, 14002 (2017). [html, pdf]
[3] N. Algarra, P.G. Karagiannopoulos, A. Lazarus, D. Vandembroucq and E. Kolb, "Bending transition in the penetration of a flexible intruder in a 2D dense granular medium", Physical Review E, 97, 022901 (2018). [Editors' Suggestion, html, pdf]
From GEometry to Motion: Inverse modeling of slender elastic rods.
with F. Bertails-Descoubes, V. Romero
|
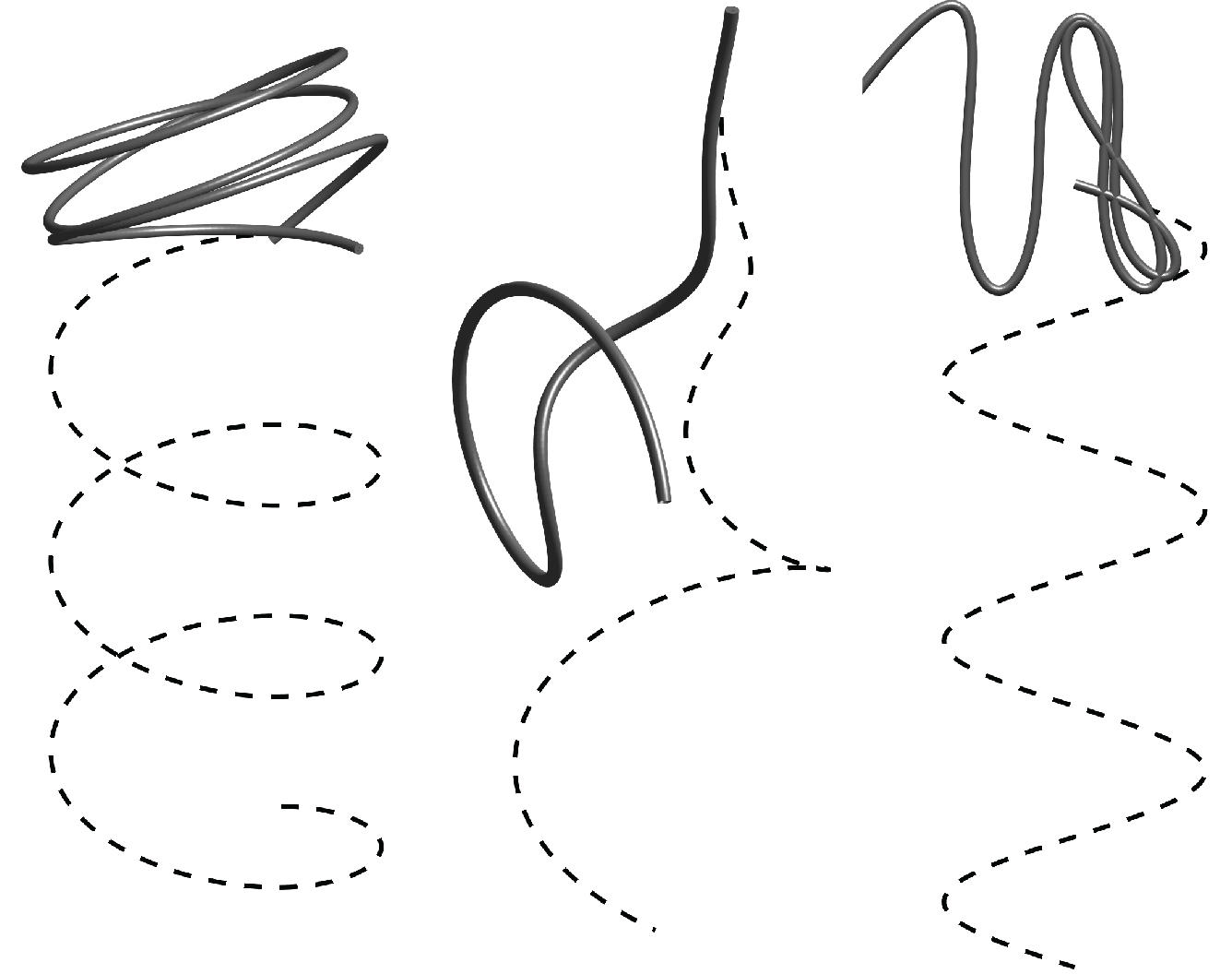
This work is supported by the European Research Council grant GEM (StG-2014-639139) received by F. Bertails-Descoubes in 2014. The geometry of an object is usually deconnected from its underlying mechanical properties. And yet, especially in slender elastic structures such as clothes, hairs or trees, there is a consistent connection between the static or dynamic shape of those structures and their mechanics. The goal of the GEM project is to establish effective numerical tools to extract mechanical informations from complex geometrical features. One basic example of this approach in given in [1]. From the 3D shape of an isotropic Kirchhoff rod under gravity, we prove that it exists a unique natural configuration of the rod that can be computed efficiently by solving only three linear initial value problems. This opens the door to inverse design: if you want to fabricate a rod that, under gravity, takes the shape of an helix, conical helix or planar sinusoid illustrated in dashed lines on the figure, our simulations suggest that you need to give that rod the natural shapes represented in full lines. |
[1] F. Bertails-Descoubes, A. Derouet-Jourdan, V. Romero and A. Lazarus, "Inverse design of an isotropic suspended Kirchhoff rod: theoretical and numerical results on the uniqueness of the natural shape", Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences, 474, 2212, 20170837 (2018). [html, pdf]